Hi All,
back to my blog series about my hexapod robot that I’m working on for about 7 months now. This is the continuation of this article about servo control, leg prototypes and inverse kinematics
The platform
At first I tried to build a platform and legs from wood of which I found out very early that it’s not sturdy enough while being a lot too heavy. Then I went with parts of a cable duct which were really light but much to easy to bend.
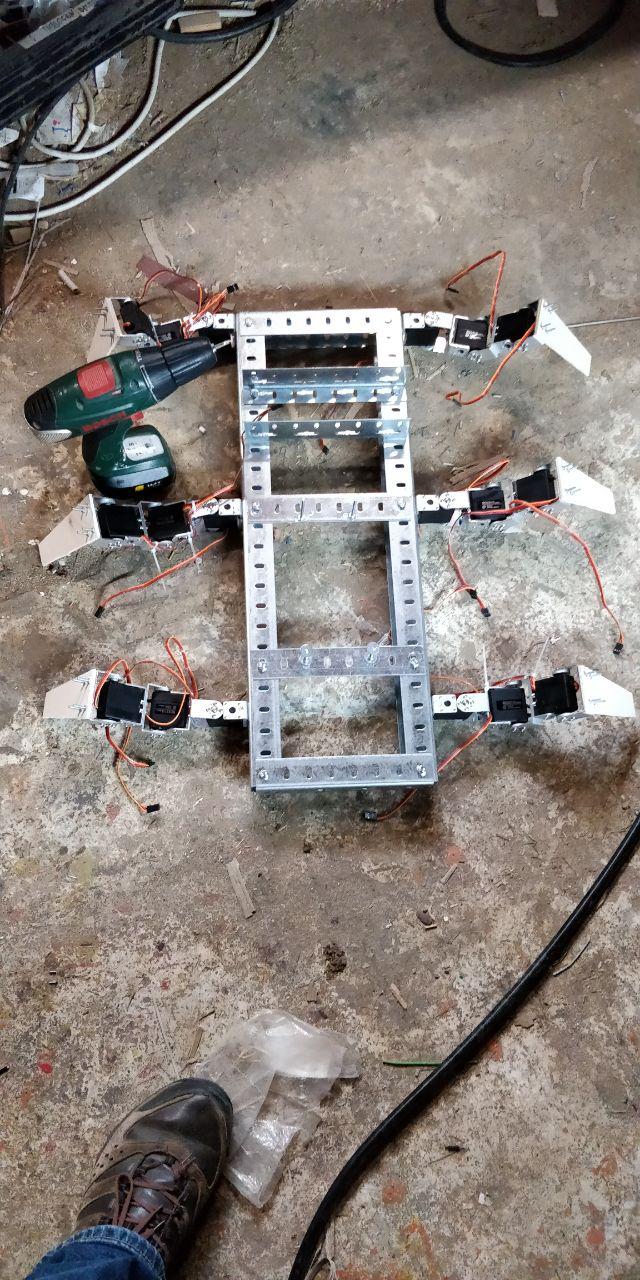
I decided early that I needed something tougher. I went with steel from my local diy market and came up with this…
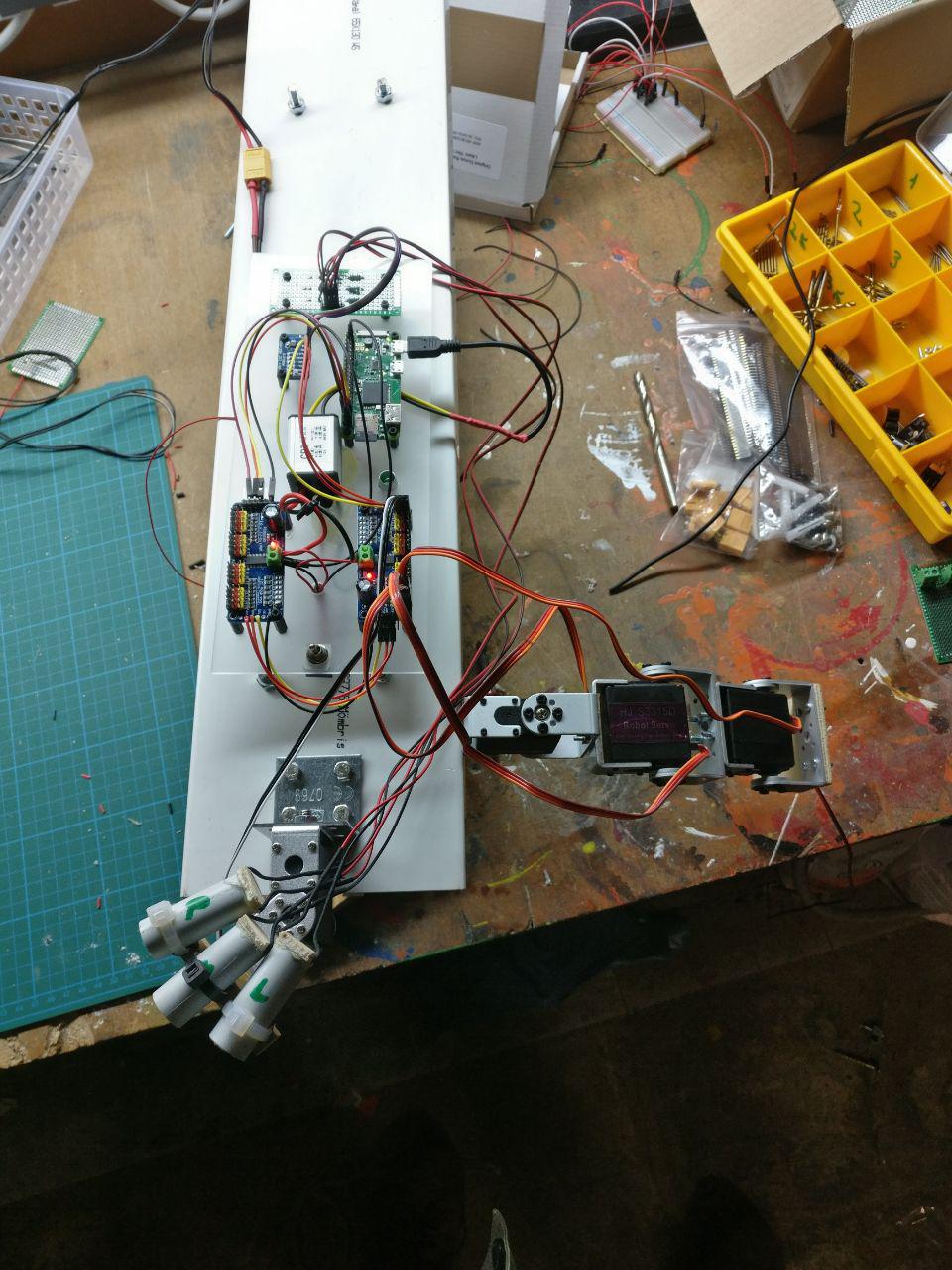
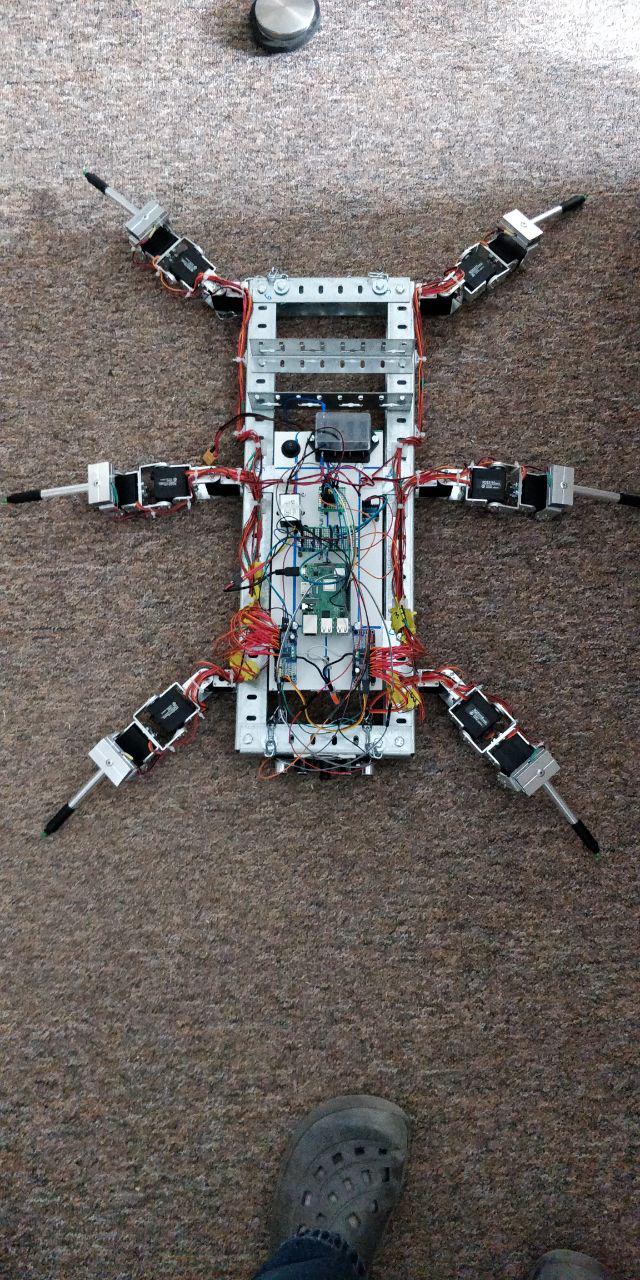
adding a bit of plastic from an old cable duct, plastic spacers and all electronics I figured I would need, this was the first platform:
intermission: purposes
the main reason to build this robot learning. I wanted to learn about electronics, raspberry pi, math and geometry, python and many other things.
But the robot also needs something to do. Just walking was not an option as that seemed “too simple” to me when I first thought about that (it is not!). So here are the missions I was thinking about:
Follow a light
The idea was to use 3 pipes, each with a light depending resistor inside and attach it to a servo. If the left pipe receives more light, move the servo to the left and so on. If both receive the same amount of light, read the servos current value and turn the robot until the servo is in a zero position. If unclear, traverse from left to right. That was surprisingly easy (in this video I have turned on the flashlight of the phone to act as an attractor)
I don’t even know why I abandoned the idea. It’s still there and would be easy to implement.
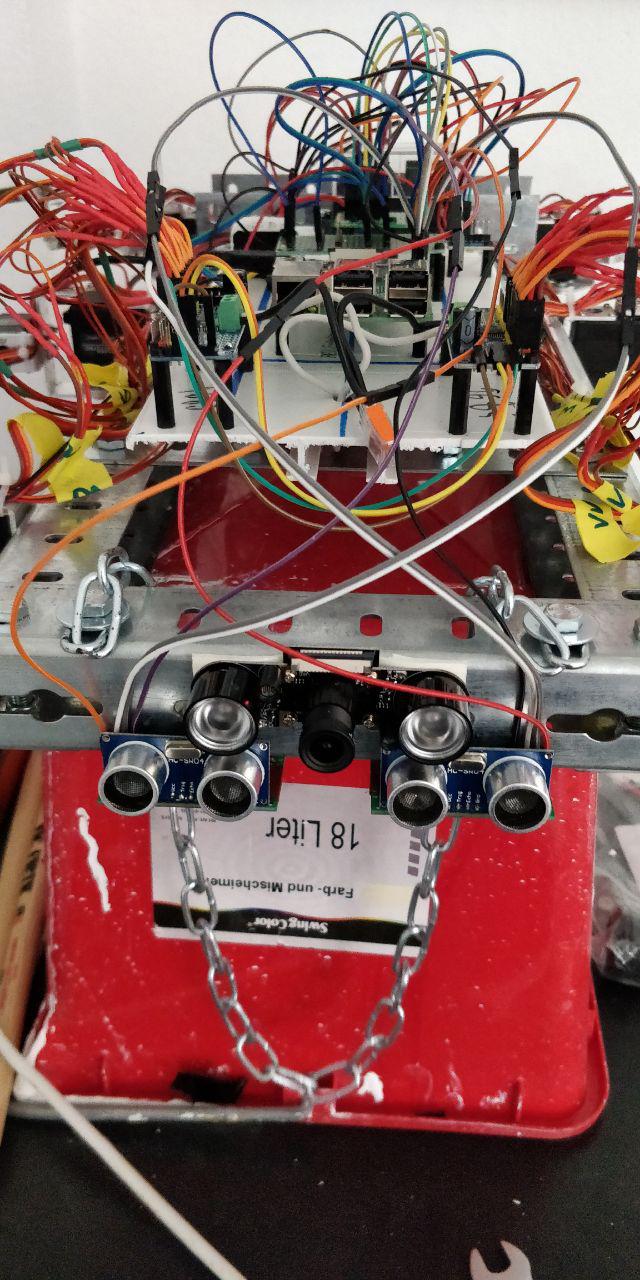
Avoid obstacles
another classic for robots. Walk along until you get too close to an obstacle, then turn around and find your way around that. That’s one thing that will be possible with the current design
Identify and climb stairs
That’s a tough one. Identifying stairs and climbing them is quite a logical challenge to solve using only distance sensors. Not sure, if this will be done
Go “somewhere” autonomously
The robot would need to identify where it is and then autonomously find it’s way to the destination. That’s another nasty one of which I have no idea how to implement.. Sounds very interesting though
…to be continued….
Pingback: Building a hexapod robot - more building and a lot to learn - Stricker Consulting