Howdy folks,
in my portfolio it says that I am exploring robotics and I have spent half a year now trying things out, building and rebuilding prototype legs, platforms and learning python. Well: I do have a blog and I thought now it’s a good time to share my experiences so far. Unfortunately my phone broke along the way, so I do not have many pictures of the early stages of the project.
The beginning
I started the project in June 2017 without a real plan, what I wanted to do. I knew that I love the raspberry-concept and that I hate, when after-work projects stay inside the computer. I love it, when I have some kind of interaction with the real world. I have already done a few projects with IP Cameras and gphoto2 and I always wanted to do more of interaction and not only consumption.
OK – let’s see if I can move a servo. So I ordered a set of really cheap servos, a breadboard and a raspberry pi zero W on amazon. I did a bit of Google research and found that you can easily control a single servo using the standard GPIO ports of the PI. I quickly noticed that this is not really feasible.
- The servo does a lot of unintended movement
- There is a LOT of cabelling involved and things get complicated and error-prone really quickly
- as soon as the servos drag too much power, the pi will probably explode
But hey – the servo moved and I got caught in the cobweb of mediocre electronics. So I started to build a simple leg using a bit of plastic, wire and hot glue and was able to more or less control it through the GPIO ports.
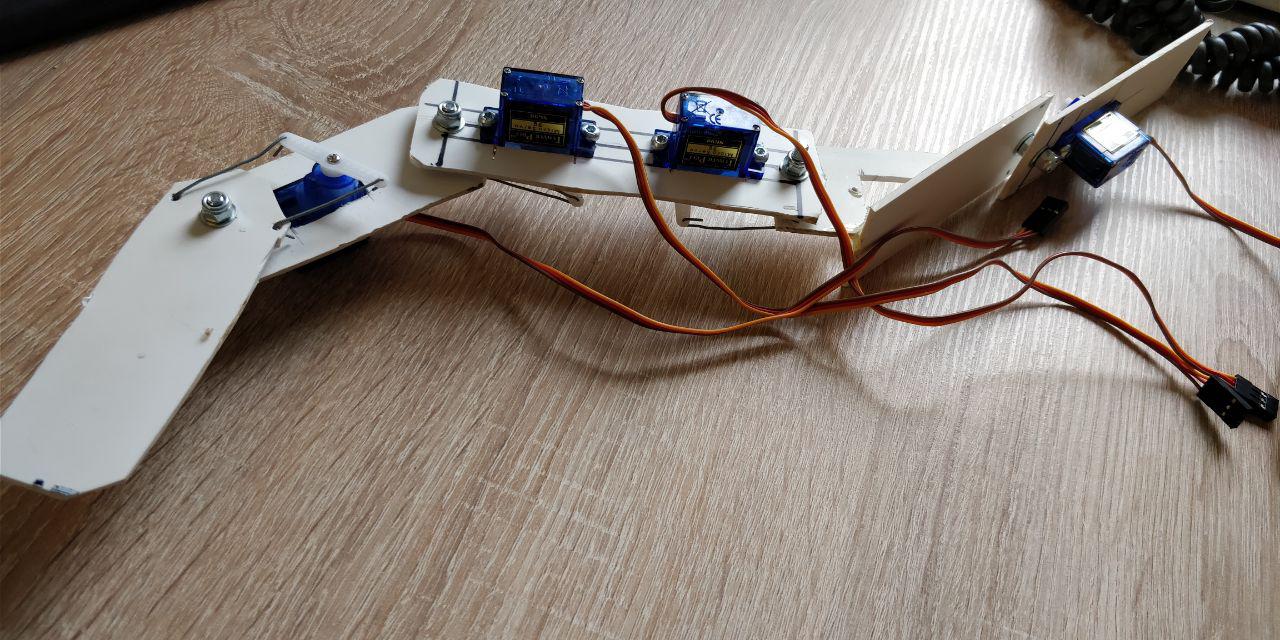
After a bit of fiddeling around, I was able to move the leg the way I wanted.
OK that really caught me. My brain was boiling with legs, platforms, API’s, AI,… The plan to build an autonomous hexapod robot was born…
….to be continued….